Section 11. Direction Matrices - This section is in construction
This section describes orientation related definitions and conventions adopted in ITK-SNAP.
In order to better understand this material, we strongly encourage the reader to also read Chapter 4 in http://voxel.dl.sourceforge.net/project/itk/itk/2.4/ItkSoftwareGuide-2.4.0.pdf.
We differentiate among (and use) the following definitions:
- Voxel space
- Physical space
- Anatomical space
Voxel Space
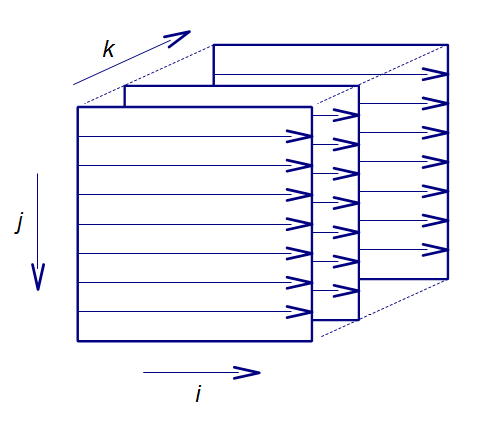
A volumetric image is a set of volume elements (voxels) arranged in a voxel space. The voxel
space is a rectangular parallelepipedic shape that indexes the voxel of the image in three directions i, j, and k as follows:
In this context, one can consider the voxels embedded in (i,j,k) which is a local (to the object) coordinate system. Note that the voxel space is always positively oriented.
Physical Space
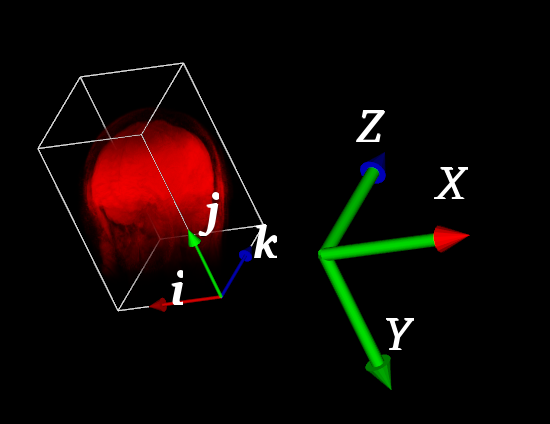
Physical space is the region where each voxel is located related to an absolute axes of coordinates. This is also the convention used by VTK (see also http://www.vtk.org). Although the physical space axes of coordinates are not always positively oriented, the graphics infrastructure of VTK "prefers" positive orientations. We illustrate the difference between
the physical and voxel spaces in the next image:
The large trihedron (in the right part of the image, of course) represents the physical space, or the absolute axes of coordinates. Unlike this, the volumetric image of the head is embedded in a "local" system of coordinates, which is the voxel space.
Anatomical Space
Anatomical space is an interpretation of the physical space related to medical practice.
In this context, we are interested in interpreting the direction of the axes, i.e. we use
terms such as anterior, posterior, left, right, inferior, superior. These terms relate to
the patient/subject under analysis. Still, we anchor these medical terms to physical coordinates.
The anatomical space consists of three anatomical directions that follow voxel and physical spaces. For each anatomical direction we use the following notations:
- R->L for right to left
- L->R for left to right
- A->P for anterior to posterior
- P->A for posterior to anterior
- I->S for inferior to superior
- S->I for superior to inferior
For each anatomical direction we also use shortcuts of one leading letter, for example instead of R->L we use R.
The anatomical notations reflect increasing indices on each axis. For example, if we adopt a R->L direction on x axis (or i axis) the sweep from right to left corresponds to an increase in x (or i). In order to encode an anatomical space we use sets of three letters, for example RAS means R->L, A->P, and S->I, on x, y, and z respectively. We show different conventions in Figure 1.
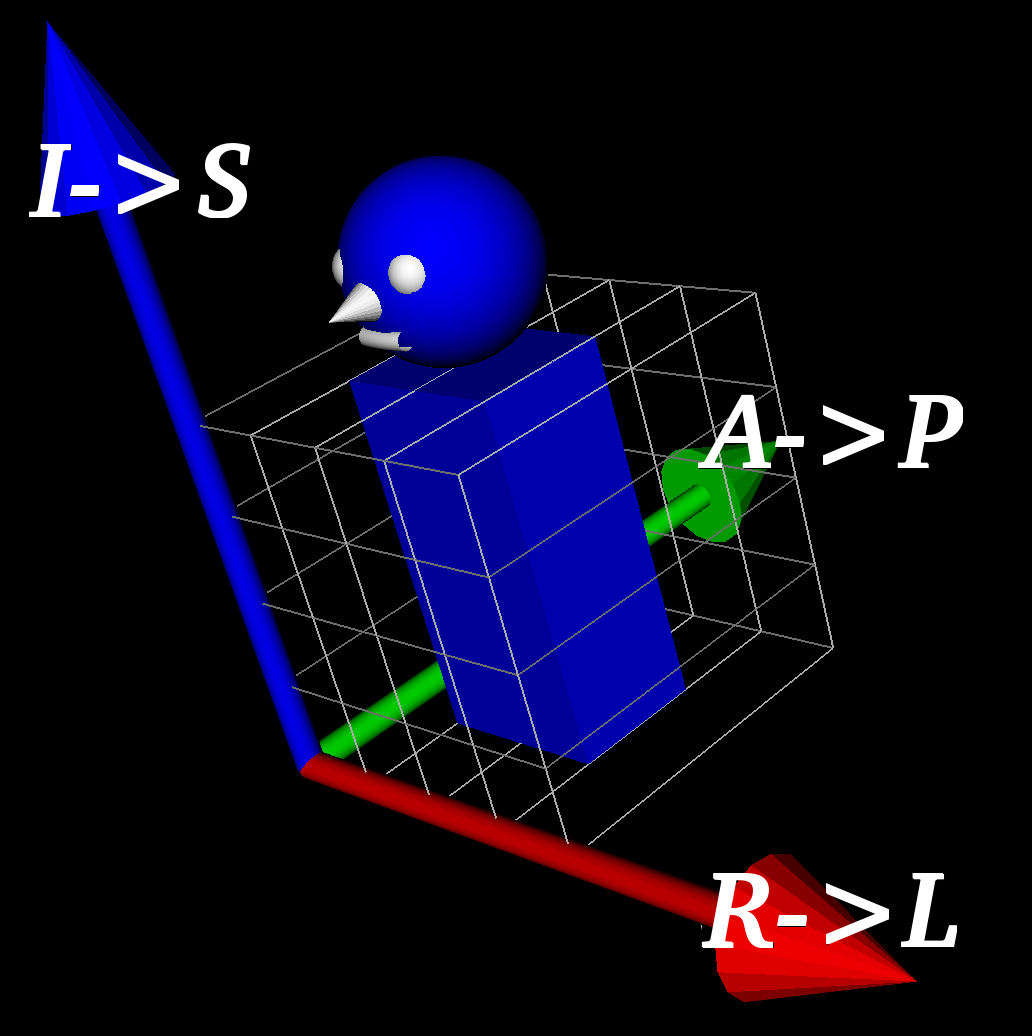
DICOM/ITK convention
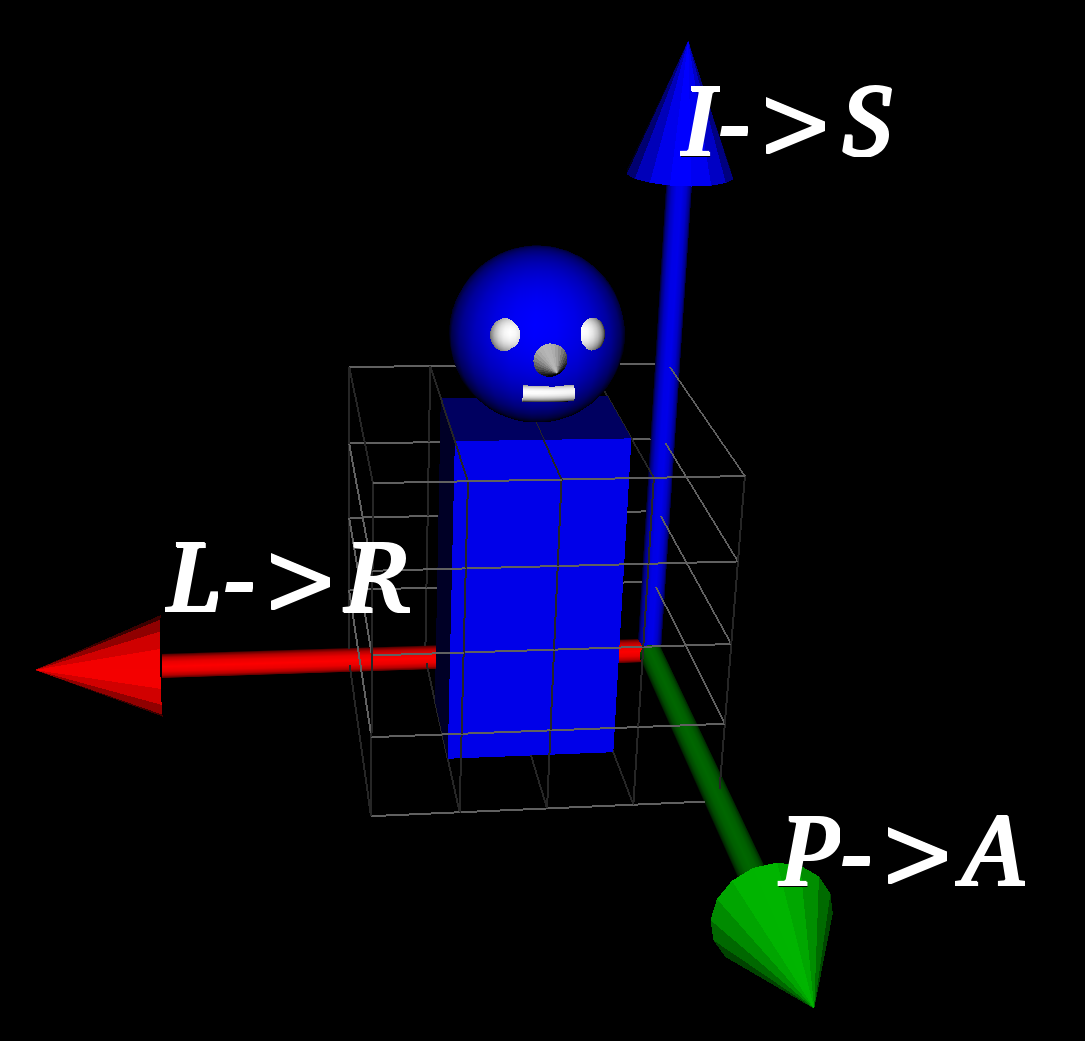
ITKSNAP and NIFTI convention
Figure 1 Anatomical conventions in ITKSNAP and different file formats. ITKSNAP follows NIFTI format.
In conclusion in the DICOM/ITK conventions we have increasing x, y, and z corresponds to R-L, A->P, and I->S,
respectively, or RAS in short. In addition, in the ITKSNAP/NIFTI conventions increasing x, y, and z correspond to L-R, P->A, and I->S, respectively, or LPI in short.
Conversions
The conversion between the voxel and physical space is performed via direction matrices. Direction matrices are implemented in ITK (see http://www.itk.org). A direction matrix consists of a set og three orthonormal vectors stored in columns. For example, let M be a direction matrix. Then M = [p q r], where p, q, and r are three orthonormal vectors. Actually, M is a rotation matrix, see also Figure 1.